清华大学机械工程系先进成形制造教育部重点实验室提出了一种基于外部 RGB-D 相机和惯性测量单元(Inertial Measurement Unit,IMU)组合的爬壁机器人自主定位方法。
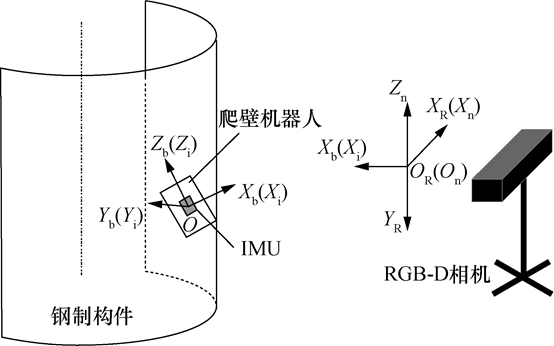
图1 爬壁机器人自主定位系统示意图
爬壁机器人广泛用于完成大型钢制构件的自动探伤和清洗等工作,在规划工作路线及指定控制策略是,需通多爬壁机器人自主定位获取其自身在钢制构件表面的位置,同时根据爬壁机器人自身的姿态调整作业探头以提高工作效率。然而,在现有机器人自主定位方法中,面对储罐、引水压力钢管等封闭的环境大大限制了GPS在机器人定位中的作用;同时,爬壁机器人工作在钢制构件表面,不可避免的受磁干扰,导致磁强度计在姿态估计中的作用受到限制。
针对封闭环境、磁干扰等特殊场景下传感器应用的受限,导致爬壁机器人自主定位误差随时间累积的问题, 清华大学机械工程系先进成形制造教育部重点实验室 提出并实现了一种基于外部 RGB-D 相机和惯性测量单元(Inertial Measurement Unit,IMU)组合的爬壁机器人自主定位方法。
该方法采用深度学习和核相关滤波 (Kernelized Correlation Filter,KCF)组合的目标跟踪方法进行初步位置定位;在此基础上,利用法向量方向投影的方法筛选出机器人外壳顶部的中心点,实现了爬壁机器人的位置定位。推导了机器人底盘法向量、横滚角与航向角的定量关系,设计了串联的扩展 Kalman滤波器(Extended Kalman Filter,EKF)计算横滚角、俯仰角和航向角,实现机器人定位中的姿态估计。
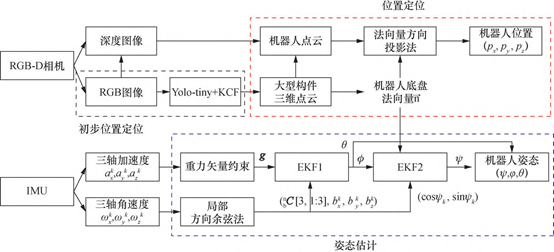
图2 RGB-D+IMU自主定位方法结构框图
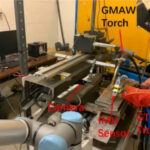
清华团队使用了一个长0.25m,宽0.19m,高0.27m的钢制构件爬壁机器人来进行实验验证,RGB-D 相机采用的是MicrosoftKinectv2,IMU采用的是ADIS16445。实物如图所示:
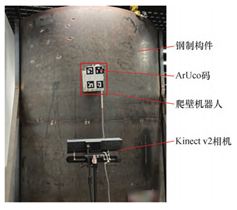
图3 RGB-D+IMU自主定位方法实物图
实验结果表明:爬壁机器人位置定位误差从0.18m下降至0.02m左右;航向角误差和横滚角误差小于2.5°,俯仰角误差小于1.5°,有效地提高了爬壁机器人的定位精度。当机器人工作范围超过单个 RGB-D相机的最大视野时,可通过多个 RGB-D相机组合的方式扩大视野范围。

图4 RGB-D+IMU自主定位方法实验结果