

SLAM是移动机器人探索未知区域所依赖的一项重要技术,当前主流的SLAM方法主要有两种类型:视觉和激光。通过视觉特征的定位技术受光照和摄像机移动速度的影响很大,移动机器人在快速移动或在照明条件较差的场景中(比如煤矿隧道)往往会导致视觉特征跟踪的丢失。特别是在煤矿隧道环境中,地面往往是不平整的,导致机器人的移动非常颠簸,加上照明不均匀等条件,这就导致移动机器人在煤矿隧道环境下,难以实现精确的自主定位和地图构建。
为解决类似于煤矿井下隧道环境下的定位和建图问题,西安科技大学Daixian Zhu团队改进了一种基于单目相机和IMU的定位和建图算法。他们设计了一种结合了点和线特征的特征匹配方法,以提高算法在恶劣场景及照明不足场景下的可靠性;紧耦合方法用于建立视觉特征约束和IMU预积分约束;采用基于滑动窗口的关键帧非线性优化算法完成状态估计。
该系统原理框图如下,主要分为前端、系统初始化和后端三个部分。

系统框图
基于上述方法,团队在不同的环境下进行了实验。
在照明环境剧烈变化、少量图像纹理条件下,选择曝光差异较大的两个连续帧来评估前端特征提取和匹配算法的可靠性。
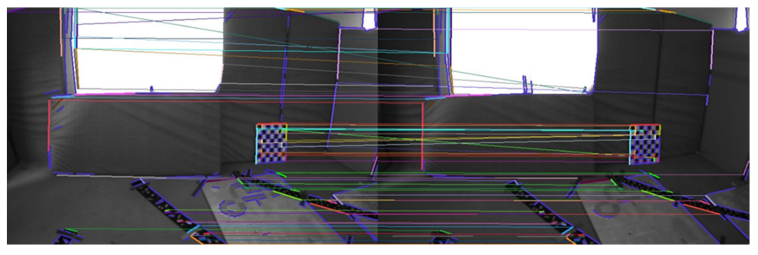
V1_03 特征点提取和匹配结果
实验统计结果表明,特征点匹配的正确率明显低于特征线匹配,且特征线的提取和匹配受光照变化的影响较小,在不同的光照条件下都具有较高的可靠性。所以,在视觉中使用特征点与特征线相结合,可以避免在光照环境变化剧烈场景下特征的丢失,从而提高算法的可靠性。
里程精度评估:如下图所示,APE轨迹绝对误差用颜色表示。团队计算的轨迹与数据集中的真值轨迹比较接近,但累积误差随着距离的增加而增加。 从每个子序列的轨迹计算效果来看,在纹理简单、光照条件较好、运动较慢的测试场景中,累积误差更小(红色轨迹更少),表明了机器人移动速度和光照条件对算法的准确性有较大的影响。
基于在两条不同路径上的轨迹跟踪结果,Daixian Zhu团队设计的算法跟踪轨迹的均方根误差分别为0.231 m和0.052 m,优于VINS-Mono的0.37 m和0.129 m。

真实路径 vs 两种算法之间的轨迹误差
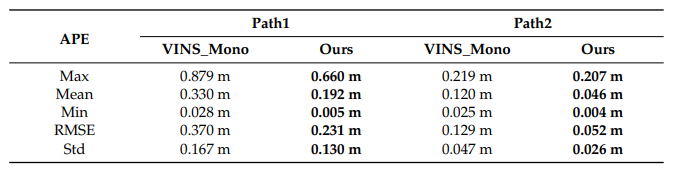
两种算法之间的误差统计
基于模拟数据和实况环境实验验证,该团队的提出的新算法,提高了移动机器人在煤矿隧道环境下,测绘和构图的精度。
论文原文:https://www.mdpi.com/1424-8220/22/19/7437






