| 论文标题_EN | 论文标题_CN | 下载 |
| Investigation of the Impact of Damaged Smartphone Sensors’ Readings on the Quality of Behavioral Biometric Models | 受损智能手机传感器读数对行为生物计量模型质量影响的调查 | Download |
| An equivalent source method for removal of attitude-induced responses in drone-towed magnetic scalar gradiometry data | 一种去除无人机牵引磁标量梯度测量数据中姿态诱导响应的等效源方法 | Download |
| Performance Evaluation of Complex Equipment Considering Resume Information | 考虑概述信息的复杂设备性能评估 | Download |
| Learning to Cycle: Is Velocity a Control Parameter for Children’s Cycle Patterns on the Balance Bike? | 学习自行车:速度是平衡自行车上儿童自行车模式的控制参数吗? | Download |
| Investigation of Thresholds for Asymmetry Indices to Represent the Visual Assessment of Single Limb Lameness by Expert Veterinarians on Horses Trotting in a Straight Line | 研究不对称指数的阈值,以代表专业兽医对直线小跑的马匹对单肢跛行的视觉评估 | Download |
| Automated vehicle data pipeline for accident reconstruction: New insights from LiDAR, camera, and radar data | 用于事故重建的自动车辆数据管道:LiDAR、摄像头和雷达数据的新见解 | Download |
| Development of Starfish-Shaped Two-Ring Microelectromechanical Systems (MEMS) Vibratory Ring Gyroscope with C-Shaped Springs for Higher Sensitivity † | 具有更高灵敏度C形弹簧的星形双环微机电系统(MEMS)振动环陀螺仪的研制 | Download |
| The contribution of multibody optimization when using inertial measurement units to compute lower-body kinematics | 使用IMU计算下半身运动学时多体优化的贡献 | Download |
| A hybrid learning-based stochastic noise eliminating method with attention-Conv-LSTM network for low-cost MEMS gyroscope | 基于混合学习的低成本MEMS陀螺仪随机噪声消除方法 | Download |
| A Framework for Analytical Validation of Inertial-Sensor-Based Knee Kinematics Using a Six-Degrees-of-Freedom Joint Simulator | 基于六自由度关节模拟器的惯性传感器膝关节运动学分析验证框架 | Download |
| Bias-Repeatability Analysis of Vacuum-Packaged 3-Axis MEMS Gyroscope Using Oven-Controlled System | 真空封装三轴微机电陀螺的偏差重复性分析 | Download |
| CROMOSim: A Deep Learning-Based Cross-Modality Inertial Measurement Simulator | CROMOSim:一种基于深度学习的跨模态惯性测量模拟器 | Download |
| An Optimal Fusion Method of Multiple Inertial Measurement Units Based on Measurement Noise Variance Estimation | 基于测量噪声方差估计的多惯性测量单元最优融合方法 | Download |
| Spacecraft attitude estimation under attitude tracking maneuver during close-proximity operations | 近距离作战姿态跟踪机动下的航天器姿态估计 | Download |
| Highly Robust Two-stage LiDAR-IMU External Parameter Online Calibration Algorithm | 高鲁棒性两阶段激光雷达惯性测量单元外参在线标定算法 | Download |
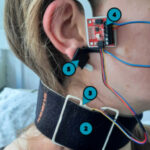
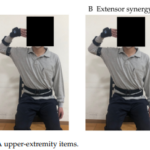
| Reduce System Redundancy and Optimize Sensor Disposition for EMG-IMU Multi-modal Fusion Human-Machine Interfaces with XAI | 使用XAI减少EMG–IMU多模态融合人机界面的系统冗余并优化传感器配置 | Download |
| Turntable IMU Calibration Algorithm Based on the Fourier Transform Technique | 基于傅里叶变换技术的转盘IMU标定算法 | Download |
| Kinematic Modelling and Position Control of A 3-DOF Parallel Stabilizing Robot Manipulator | 三自由度并联稳定机器人机械手的运动学建模和位置控制 | Download |