| 论文标题_EN | 论文标题_CN | 下载链接 |
| Two-Step Self-Calibration of LiDAR-GPS/IMU Based on Hand-Eye Method | 基于手眼法的激光雷达-GPS/IMU两步自标定 | Download |
| Error State Extended Kalman Filter Localization for Underground Mining Environments | 地下采矿环境的错误状态扩展卡尔曼滤波器定位 | Download |
| Mapping and localization for autonomous ship using LiDAR SLAM on the sea | 海上使用激光雷达SLAM的自主船舶测绘和定位 | Download |
| Position and Attitude Determination in Urban Canyon with Tightly Coupled Sensor Fusion and a Prediction-Based GNSS Cycle Slip Detection Using Low-Cost Instruments | 使用低成本仪器通过紧密耦合传感器融合和基于预测的GNSS循环滑移检测确定城市峡谷中的位置和姿态 | Download |
| Research on Multi-Sensor Fusion SLAM Algorithm Based on Improved Gmapping | 基于改进Gmap的多传感器融合SLAM算法研究 | Download |
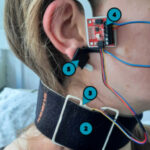
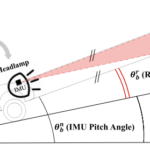
| Feasibility of an inertial measurement unit sensor-based guiding system for benign paroxysmal positional vertigo treatment: A pilot study | 基于惯性测量单元传感器的引导系统用于良性阵发性位置性眩晕治疗的可行性:一项初步研究 | Download |
| A factor set-based GNSS fault detection and exclusion for vehicle navigation in urban environments | 一种基于因子集的GNSS故障检测与排除,用于城市环境中的车辆导航 | Download |