| 论文标题_EN | 论文标题_CN | 文件链接 |
| All-Parameter System-Level Calibration for SINS/CNS based on global observability analysis | 基于全局可观测性分析的SINS/CNS全参数系统级校准 | Download |
| Robust Visual-Inertial Odometry Based on a Kalman Filter and Factor Graph | 基于卡尔曼滤波和因子图的鲁棒视觉惯性里程计 | Download |
| Ultrasonic positioning and IMU data fusion for pen-based 3D hand gesture recognition | 超声波定位和 IMU 数据融合,用于基于笔的 3D 手势识别 | Download |
| Free-walking: Pedestrian inertial navigation based on dual foot-mounted IMU | 自由行走:基于双脚踏式IMU的行人惯性导航 | Download |
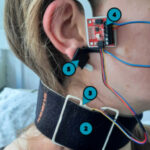
| Test-re-test reliability and dynamics of the Fukuda–Unterberger stepping test | 福田-温特贝格尔步进测试的重新测试可靠性和动力学 | Download |
| A Review of Perception-Based Navigation System for Autonomous Mobile Robots | 基于感知的自主移动机器人导航系统研究进展 | Download |
| AwarNS: A framework for developing context-aware reactive mobile applications for health and mental health | AwarNS:用于开发用于健康和心理健康的上下文感知反应式移动应用程序的框架 | Download |
| Designing INS/GNSS integrated navigation systems by using IPO algorithms | 利用IPO算法设计INS/GNSS集成导航系统 | Download |
| Free-walking: Pedestrian inertial navigation based on dual foot-mounted IMU | 自由行走:基于双脚踏式IMU的行人惯性导航 | Download |
| A localization method of wall-climbing robot based on lidar and improved AMCL | 一种基于激光雷达和改进AMCL的爬墙机器人定位方法 | Download |
| A UAV Localization System Based on Double UWB Tags and IMU for Landing Platform | 一种基于双UWB标签和IMU的着陆平台无人机定位系统 | Download |
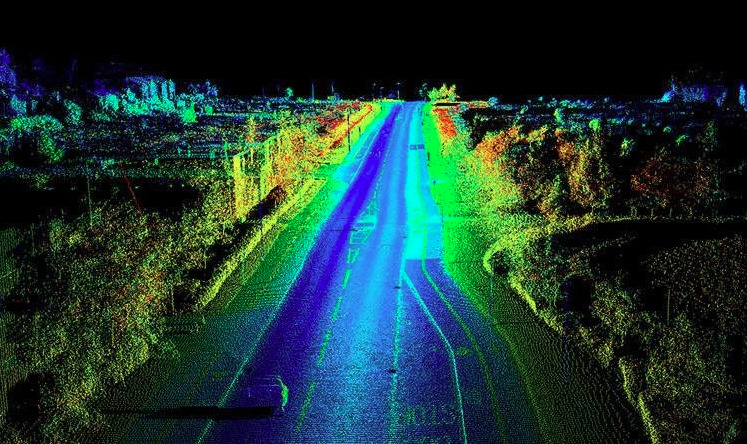
| Enhancing RTK Performance in Urban Environments by Tightly Integrating INS and LiDAR | 通过紧密集成INS和LiDAR提高城市环境中的RTK性能 | Download |
| An adaptive weighting strategy for multi sensor integrated navigation in urban areas | 城市多传感器集成导航的自适应加权策略 | Download |
| RIOT: Recursive Inertial Odometry Transformer for Localisation from Low-Cost IMU Measurements | RIOT:递归惯性里程计变压器,用于低成本IMU测量的定位 | Download |
| LSTM-Based Projectile Trajectory Estimation in a GNSS-Denied Environment † | GNSS拒绝环境下基于LSTM的弹丸轨迹估计† | Download |
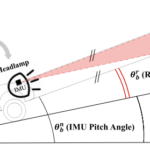
| A DNN-Based Optical Aided Autonomous Navigation System forUAV Under GNSS-denied Environment | GNSS拒绝环境下基于DNN的无人机光学辅助自主导航系统 | Download |
| Vehicle Localization onSemantic Map byCombining Visual andDistance Measurements | 通过结合视觉和距离测量在语义图上定位车辆 | Download |