Inertial Measurement Units (IMUs) are fundamental components of spacecraft (e.g., satellites and launch vehicles) and typically contain several complex inertial sensors, such as gyroscopes and accelerometers.IMUs not only measure three-axis angular velocities and accelerations, but also autonomously establish the spacecraft's orientation and attitude references under various complex environmental conditions. In addition, IMUs provide attitude and position information to the spacecraft and play a key role in feedback from the onboard controller. Therefore, the operating status of IMUs is critical to spacecraft safety.
In order to monitor the operating status of IMUs and enhance their stability, researchers have proposed several fault diagnosis methods. Currently, the common fault diagnosis method is to transmit the IMU data from the orbiting spacecraft to the ground telemetry center for analysis. Fault features are extracted manually and fault patterns are categorized. This relies heavily on the extensive knowledge and experience of experts, making this task very time-consuming and costly in terms of labor. With the rapid growth of telemetry data volume, fault classification methods based on traditional machine learning methods (e.g., decision trees, support vector machines (SVMs), and Bayesian classifiers, etc.) show their limitations and lack of diagnostic accuracy. Therefore, it is urgent to improve the diagnostic accuracy and efficiency of massive data.
Gang Xiang's team from Beijing University of Aeronautics and Astronautics (BUAA), Beijing Institute of Automatic Control (BIAC), and Beijing Institute of Electronic System Engineers (BIESE) proposed a new intelligent fault diagnosis method combining a deep residual convolutional neural network (CNN) and a data preprocessing algorithm. The algorithm first employs the Short Time Fourier Transform (STFT) to perform data transformation on the original time domain data to extract useful information and features. Z-score normalization and data enhancement strategies are then explored and utilized to facilitate subsequent deep model training. In addition, the improved CNN-based deep diagnostic model utilizes Parameter Corrected Linear Units (PReLUs) as activation functions and residual blocks to automatically learn fault features and classify fault types.

Deep learning based faults are becoming increasingly difficult due to the weak fault characteristics of spacecraft in engineering scenarios. The team proposes a new intelligent fault diagnosis method for IMUs, which is based on a deep residual convolutional neural network with short time Fourier transform (STFT). First, to extract more features, the team utilizes the STFT to process the raw signals from the IMU and obtain time-frequency features. Then, several data enhancement strategies were employed to make the training dataset more diverse in order to eliminate training difficulties and avoid overfitting due to the small sample problem. Finally, a new deep model is constructed which employs a residual convolutional neural network in order to automatically extract discriminative feature representations of the fault model and identify fault classes with high accuracy.

Framework diagram of the fault diagnosis methodology
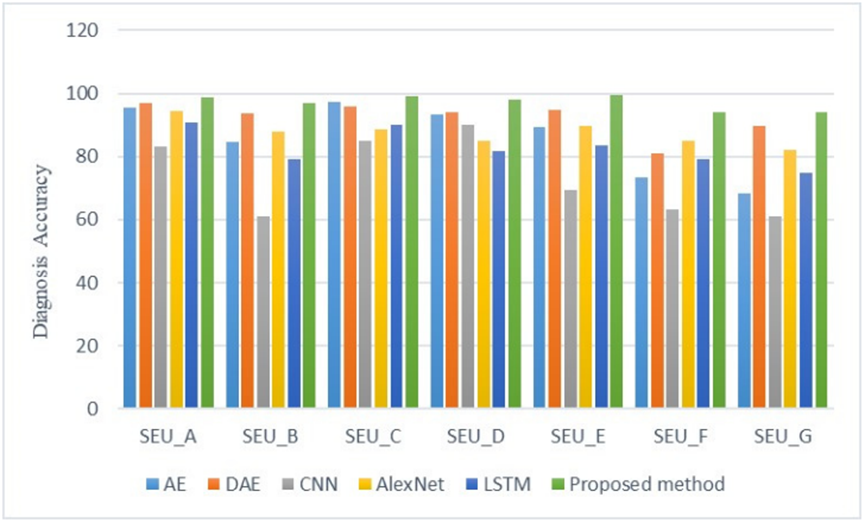
The team conducted experiments on the SEU dataset provided by Southeast University, and the results show that the team's proposed method outperforms other algorithms in fault diagnosis accuracy, reaching 97.161 TP3T.
Original paper: https://www.mdpi.com/2075-1702/10/10/851