
In recent years, we have made remarkable achievements in the scale and speed of railroad tunnel construction, with 19,630 km of railroad tunnels and over 6,000 km of subway tunnels completed nationwide by the end of 2020. To ensure the safe operation of tunnels, a lot of human and material resources need to be invested in deformation monitoring and operation and maintenance inspection of tunnels. The traditional railroad measurement adopts manual observation method, using manual observation with high accuracy, but low detection efficiency, which cannot meet the requirements of dynamic continuous high-precision holographic measurement of the railroad.
With the development of laser scanning technology, mobile laser scanning is widely used in tunnel inspection. Mobile mapping system usually contains laser scanner, IMU and panoramic camera. Mobile laser scanning is highly efficient, accurate and automated, which has greatly improved the efficiency of railroad tunnel inspection. However, the integration of IMU navigation data and mobile laser scanning data as a way to obtain real railroad 3D information has been a problematic issue to be solved urgently.
To this end, the School of Geography and Mapping of Tongji University and China Railway Shanghai Design Institute have designed a trajectory filtering-based point cloud reconstruction method for mobile laser scanning systems. The method uses deep learning to identify railroad feature points to correct odometer data and uses RTS (Rauch-Tung-Striebel) filtering to optimize the trajectory results. Combined with the railroad test track data, the RTS algorithm can control the maximum difference within 7 cm in the east and north coordinate directions, and the average elevation error is 2.39 cm, which is better than that due to the traditional KF (Kalman filter) algorithm.
The designed mobile mapping system consists of a laser scanner, panoramic camera, track inspection vehicle, IMU, GNSS system, and trip meter. The mobile laser scanning system is used for data acquisition, and the orthophoto images are used for automatic feature point identification and mileage correction, while the track data are optimized by KF algorithm to obtain high accuracy track data.
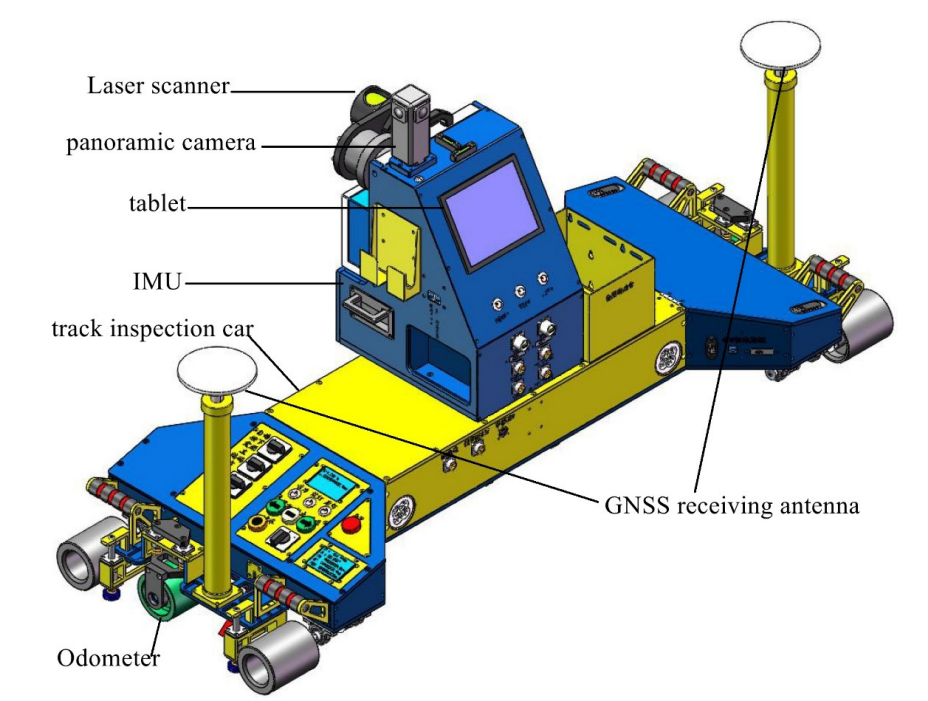
Schematic of the mobile railroad inspection vehicle, including laser scanner, IMU, GNSS antenna, tablet, odometer and panoramic cam
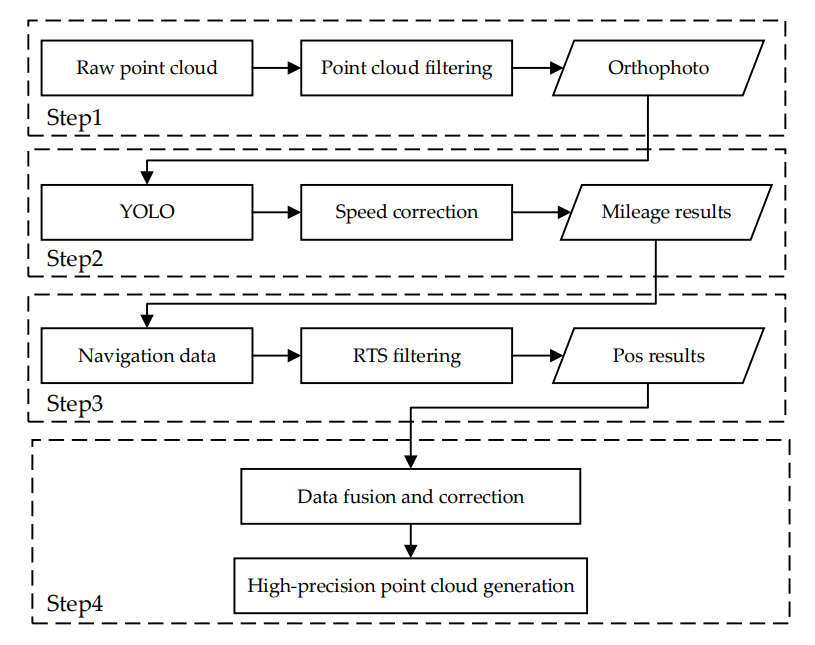
Railroad mobile laser scanning data processing flow chart
The team tested the feasibility and accuracy of the scheme at the comprehensive test site of Tongji University Jiading Campus, with a total test distance of about 200m.

Mobile laser scanning system in an experimental environment
Results:
1) Target detection and mileage calibration accuracy test results
The team built a railroad fastener dataset from thousands of kilometers of laser moving scan data, and randomly selected 925 images as training data and 322 images designated as test data. After deep learning, the system compared the fastener positions of this experimental laser scan image with the manually marked rail fastener positions to verify the target detection accuracy. The experimental results show that the accuracy of rail fasteners extracted by YOLO V3 is above 91.3%.
Feature point recognition results
The results of comparing the actual measured values with the odometry positioning algorithm are shown in the table below. The mileage positioning error before filtering is within 9 cm, and the mileage positioning accuracy after filtering is within 6 cm with a standard error of 0.04.
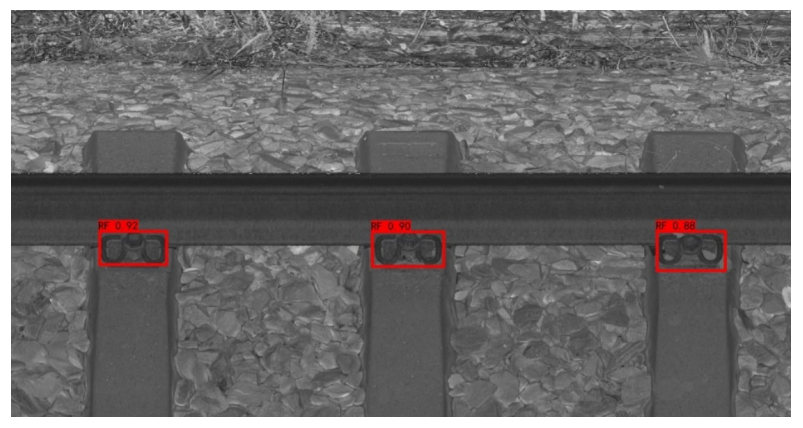
Feature point recognition results
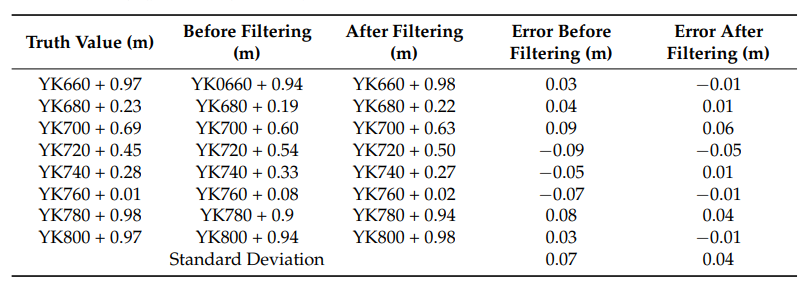
Results of comparison of actual measurements with the mileage positioning algorithm
2) Track correction test results
Before the on-board test, the installation deviation angle of the inertial navigation system was pre-calibrated using the odometer information and the reference position point. The heading angle (α) = -0.4579° and the heading angle (γ) = 0.5457°, and the installation deviation angle meets the requirement of small angle. After introducing the installation deviation angle error, the system error caused by installation is better corrected. At the same time, the divergence trend of inertial navigation trajectory over time is suppressed.

3) 3D point cloud generation accuracy
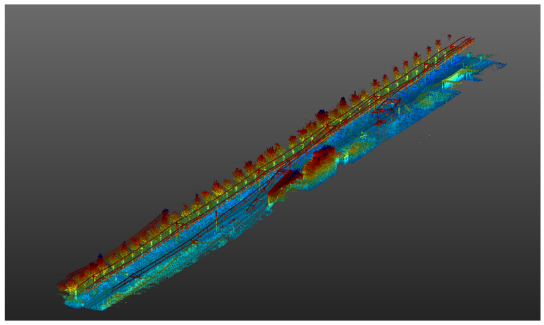
After the data acquisition is completed, the track data is filtered and smoothed to calculate the positioning and attitude information of the trolley track on the railroad track. Combined with the solved trajectory, vehicle system calibration parameters, INS information, and scanned point cloud synchronization information, the calculation is carried out to realize the conversion from relative point cloud to geographic coordinate system. The 3D point cloud data of the railroad track under the Shanghai urban construction coordinate system is obtained, as shown in Fig.
The coordinates of the 23 identification points selected for the experiment were measured by total station measurement, and the accuracy of the measurement results reached millimeter level. By comparing the coordinates of the corresponding 3D point cloud identification points, the corresponding coordinate differences and statistical differences are obtained.
The average error of the absolute value of the north coordinate direction is 0.86cm, the maximum difference is 4.6cm, and the standard deviation is 1.65. The average error of the absolute value of the east coordinate direction is 1.34cm, the maximum difference is 6.9cm, and the standard deviation is 2.95. The average error of the absolute value of the elevation coordinate direction is 2.39cm, the maximum difference is 6.33cm, and the standard deviation is 1.77. The error of the system is 1.6cm. The above experimental results show that the overall accuracy of the system is high.
It is reasonable to believe that the system, if put into operation, will greatly improve the automation of railroad inspection, while improving the efficiency and accuracy of inspection.
Original paper: https://www.mdpi.com/2072-4292/14/19/4965


