| Thesis Title_EN | Paper Title_CN | Download |
| Investigation of the Impact of Damaged Smartphone Sensors' Readings on the Quality of Behavioral Biometric Models | An Investigation of the Impact of Damaged Smartphone Sensor Readings on the Quality of Behavioral Biometric Models | Download |
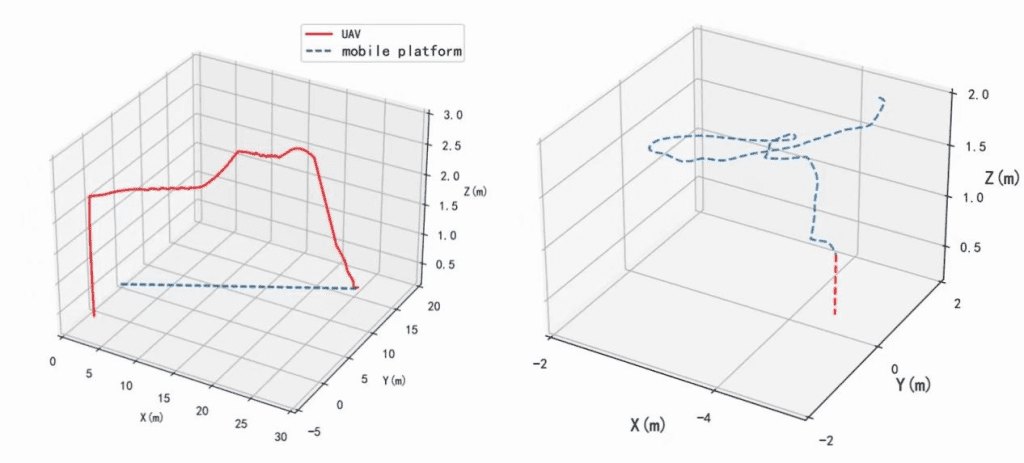
| An equivalent source method for removal of attitude-induced responses in drone-towed magnetic scalar gradiometry data | An Equivalent Source Method for Removing Attitude-Induced Response from UAV Traction Magnetic Scalar Gradient Measurement Data | Download |
| Performance Evaluation of Complex Equipment Considering Resume Information | Complex device performance evaluation considering overview information | Download |
| Learning to Cycle: Is Velocity a Control Parameter for Children's Cycle Patterns on the Balance Bike? | LEARNING BIKE: Is speed the controlling parameter for kids' bike mode on a balance bike? | Download |
| Investigation of Thresholds for Asymmetry Indices to Represent the Visual Assessment of Single Limb Lameness by Expert Veterinarians on Horses Trotting in a Straight Line | Study of the threshold of the asymmetry index to represent the visual assessment of single limb lameness by professional veterinarians in horses trotting in a straight line | Download |
| Automated vehicle data pipeline for accident reconstruction: New insights from LiDAR, camera, and radar data | Automated vehicle data pipelines for accident reconstruction: new insights from LiDAR, camera and radar data | Download |
| Development of Starfish-Shaped Two-Ring Microelectromechanical Systems (MEMS) Vibratory Ring Gyroscope with C-Shaped Springs for Higher Sensitivity † | Development of a star-shaped dual-ring microelectromechanical systems (MEMS) vibrating ring gyroscope with a higher sensitivity C-spring | Download |
| The contribution of multibody optimization when using inertial measurement units to compute lower-body kinematics | Contribution of multibody optimization in the calculation of lower body kinematics using IMUs | Download |
| A hybrid learning-based stochastic noise eliminating method with attention-Conv-LSTM network for low-cost MEMS gyroscope | Low-cost MEMS gyroscope random noise cancellation based on hybrid learning | Download |
| A Framework for Analytical Validation of Inertial-Sensor-Based Knee Kinematics Using a Six-Degrees-of-Freedom Joint Simulator | A validation framework for inertial sensor knee kinematic analysis based on a six-degree-of-freedom joint simulator | Download |
| Bias-Repeatability Analysis of Vacuum-Packaged 3-Axis MEMS Gyroscope Using Oven-Controlled System | Bias Repeatability Analysis of Vacuum-Encapsulated Three-Axis Microelectromechanical Gyroscopes | Download |
| CROMOSim: A Deep Learning-Based Cross-Modality Inertial Measurement Simulator | CROMOSim: a deep learning-based cross-modal inertial measurement simulator | Download |
| An Optimal Fusion Method of Multiple Inertial Measurement Units Based on Measurement Noise Variance Estimation | Optimal fusion method of multiple inertial measurement units based on measurement noise variance estimation | Download |
| Spacecraft attitude estimation under attitude tracking maneuver during close-proximity operations | Spacecraft attitude estimation under close combat attitude tracking maneuvers | Download |
| Highly Robust Two-stage LiDAR-IMU External Parameter Online Calibration Algorithm | Highly robust two-stage lidar inertial measurement unit external parameter online calibration algorithm | Download |
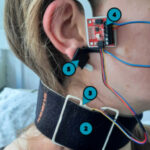
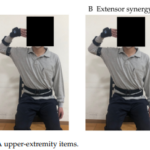
| Reduce System Redundancy and Optimize Sensor Disposition for EMG-IMU Multi-modal Fusion Human-Machine Interfaces with XAI | Reducing System Redundancy and Optimizing Sensor Configurations for the EMG-IMU Multimodal Fusion HMI with XAI | Download |
| Turntable IMU Calibration Algorithm Based on the Fourier Transform Technique | IMU calibration algorithm for turntable based on Fourier transform technique | Download |
| Kinematic Modelling and Position Control of A 3-DOF Parallel Stabilizing Robot Manipulator | Kinematic modeling and positional control of a three-degree-of-freedom parallel stabilized robot manipulator | Download |