
马匹兽医进行视觉步态评估是诊断马匹运动障碍的一个重要部分,对运动不对称性的测量可以为诊断提供客观支持。为了调查分析马匹不对称指数阈值,以此区分健康马和跛行的马,来自法国的Claire Macaire科研团队研制了EQUISYM®系统,该系统由放置在马匹头部、肩部、骨盆和四个炮骨的七个IMU(惯性测量单元)组成,能够实时记录马匹的运动数据,实验中用定制的Matlab2020a脚本对数据进行处理得到不对称指数(AI)平均值和标准差(SD),使用软件RStudio用图形方法对数据进行正态性评估。

兽医先对马匹进行了运动评估,根据这一评估,马匹被分为五组:67匹马右前肢(RF)跛行、62匹马左前肢(LF)跛行、23匹马右后肢(RH)跛行、23匹马左后肢(LH)跛行和29匹健全马匹。
马匹在一条硬直道上进行两次小跑测试,四块炮骨上的IMU数据确定了站立阶段的时间,一个步幅被定义为左前肢连续两次踏足之间的时间。头部、肩部和骨盆的垂直位移被分割成步幅。沿着马的背腹轴测得的加速度信号经过两次整合后使用四阶巴特沃斯滤波器进行高通滤波,截止频率设定为1赫兹,以获得位移曲线。
根据头、肩和骨盆在一个步幅内发生的垂直位移,为每个IMU位置计算了四个变量,以下是不对称指数(AI),以一个步幅内最大运动范围的百分比表示。
AI-Min是垂直运动最低点的左右之差;
AT-Max是垂直运动最高点的左右之差;
AI-up是推进阶段向上运动范围的左右之差;
AI-down是阻尼阶段向下运动范围的左右之差。、
正的AI值表示右脚站立时的运动幅度比左脚站立时小,负的AI值表示相反。
用软件RStudio对不对称指数进行分析后,绘制接收操作特征曲线,并计算出具有最高特异性和敏感性的阈值。在本次实验中,如果敏感度和特异度之和高于150%,则认为该指数具有良好的区分能力。
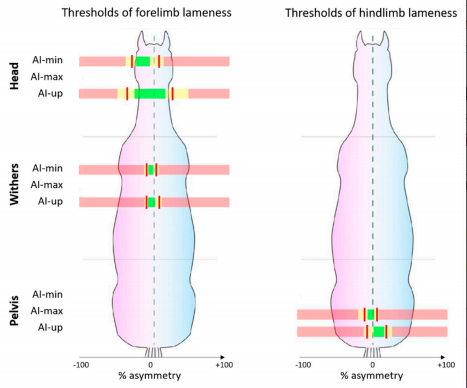
只有敏感度和特异度之和超过150%的左右跛行的AI才被绘制出来。三个范围的数值表示:黄色表示阈值周围的95%置信区间(95% CI),绿色表示低于95% CI的数值(健全马),红色表示超过95% CI的数值(跛脚马)。
图片显示了敏感度和特异度之和超过150%的左右跛行识别的阈值及其95%的置信区间(CI),证实了马匹头部和肩部的垂直位移是前肢跛行的重要指标,而骨盆的垂直位移能区分后肢跛行。
在此次实验中,由7个IMU组成的EQUISYM®系统为实验提供了有力的支持,可以在一定程度上为兽医的临床诊断提供技术支持,但未来还需要进一步研究马匹头部、肩部和骨盆运动之间的相互关系,提供更多关于跛行识别和各种临床情况下指数之间关系的信息,以实现更精准全面的马匹跛行情况识别。



