随着油气资源开采量的增加,资源勘探和开采难度也逐渐增加,因此对定向钻井轨迹的测量精度提出了更高要求。传统的随钻测斜仪不能实现钻具姿态的实时连续动态测量,同时传感器测量位置远离钻头,测得信息存在误差,无法得到精确的井眼轨迹信息,从而会影响整个钻进过程。
为解决近钻头位置动态井斜角测量精度的问题,来自中国的杨海科研团队提出了一种基于无迹卡尔曼滤波(Unscented Kalman Filter,UKF)与互补滤波(complementary filter,CF)的随钻井斜角与工具面角动态精确测量方法。为了得到精度更高的测量数据,团队使用了IMU(惯性测量单元)作为测量工具,并对IMU的测量数据进行了不同的滤波处理。
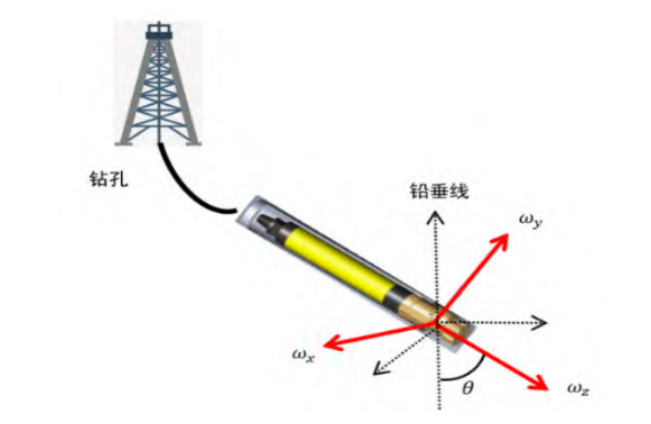
井斜测量传感器安装方向示意图
团队采用限幅滤波器滤除加速度传感器的冲击噪声,用低通滤波器滤除陀螺仪的高频噪声,然后利用无迹卡尔曼滤波器滤除大部分IMU中的振动噪声,再利用陀螺仪测得的角速度信号与加速度信号进行互补滤波后消除零偏干扰信号而计算得到井斜角和工具面角。
为验证所提方法对噪声的抑制能力和重力加速度信号提取的精度,团队进行了三次实验:
①使用 MATLAB进行算法验证:通过基于UKF+CF方法提取出的陀螺仪角速度信号后,计算结果与实际井斜角的误差为±0.2°。
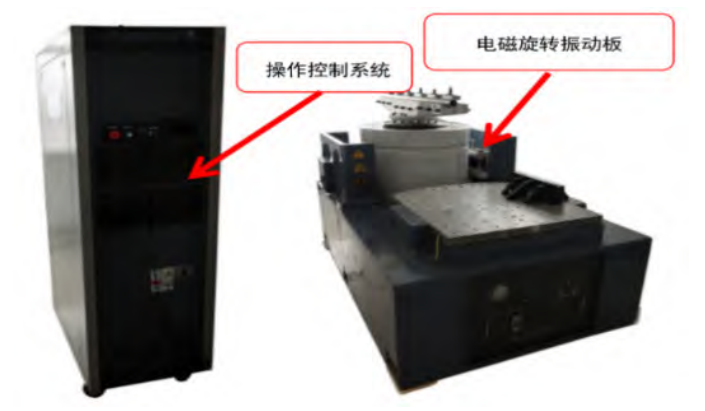
②使用旋转振动测试系统(如图2)进行了实验测试,实验过程中的实际井斜角设置为30°,钻具转速为150r/min,IMU采样率为200Hz。计算结果的井斜角最大误差为-0.08°,且整体精度接近±0.1°。
③利用现场钻井近钻头随钻测量仪器在井下工作过程中存储并经过地面导出的实测数据对算法进行了性能检验。结果表明,使用现场数据的测试结果与上述实验结果基本一致,UKF+CF 法测井倾角精度为±0.2°。
为了验证该方法在不同井斜角和不同转速情况下的性能,团队还进行了附加实验,将井斜角调整至10°、30°、45°和60°位置,分别设置钻具转速60r/min、120r/min、200r/min和300r/min。模拟不同井斜角和钻具转速的工况参数,实验结果与之前基本一致,井斜角测量精度为±0.2°,最大误差为±0.19°,可见该方法具有很高的角度测量精度,同时测量精度并不受钻具转速限制,非常适用于不同转速下的连续井斜角测量。