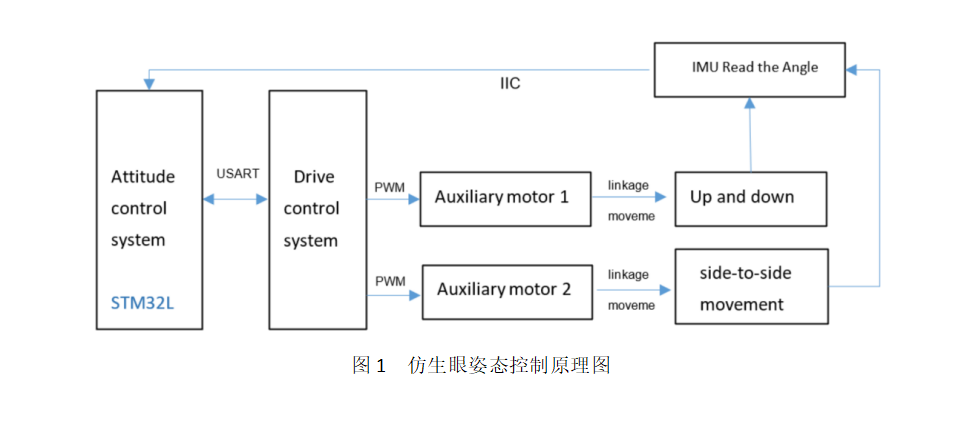
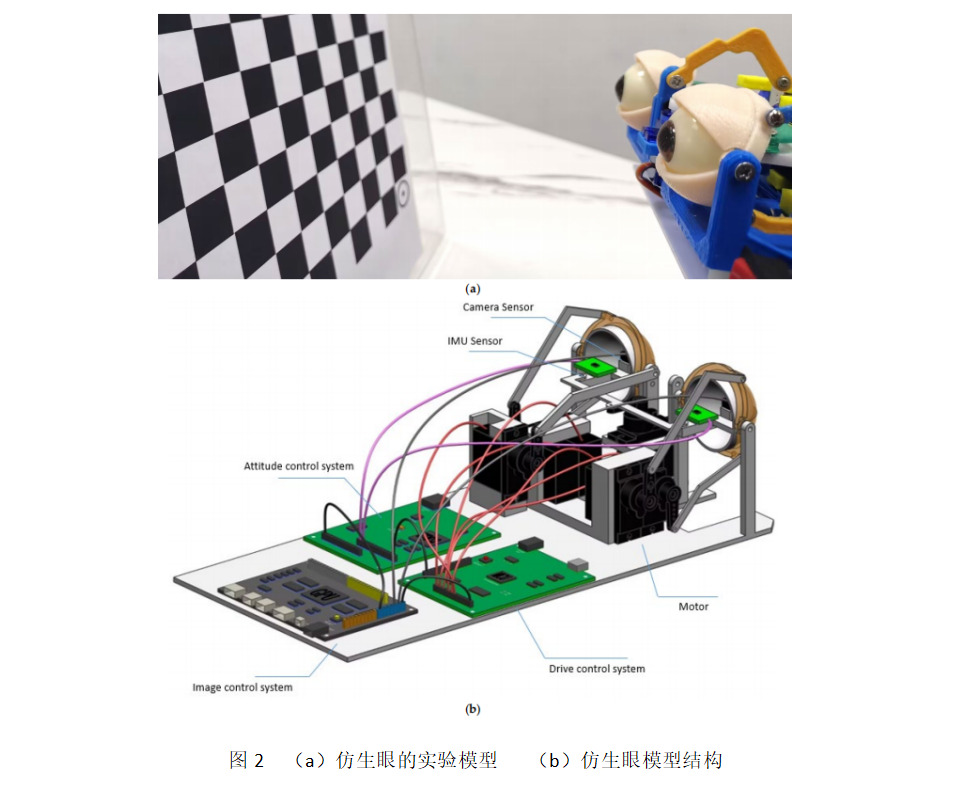
近年来,机器视觉已成为人工智能领域的一个热门研究方向,来自中国的Hongxin Zhang和韩国的Suan Lee设计了一个可以显著减少姿态角误差的新型机器人仿生眼运动姿态控制系统。该系统使用低功耗MCU作为主控,通过搭载IMU(惯性测量单元)快速准确地获取仿生眼的姿态数据,并通过算法融合测量数据,获得稳定准确的仿生眼姿态数据。

近年来,机器视觉已成为人工智能领域的一个热门研究方向,来自中国的Hongxin Zhang和韩国的Suan Lee设计了一个可以显著减少姿态角误差的新型机器人仿生眼运动姿态控制系统。该系统使用低功耗MCU作为主控,通过搭载IMU(惯性测量单元)快速准确地获取仿生眼的姿态数据,并通过算法融合测量数据,获得稳定准确的仿生眼姿态数据。
![]()
![]()
![]()
![]()