IMU Master — 产品 — XSENS — 视觉增强惯性导航系统XSENS Vision Navigator
视觉增强惯性导航系统(VINS)
产品简介
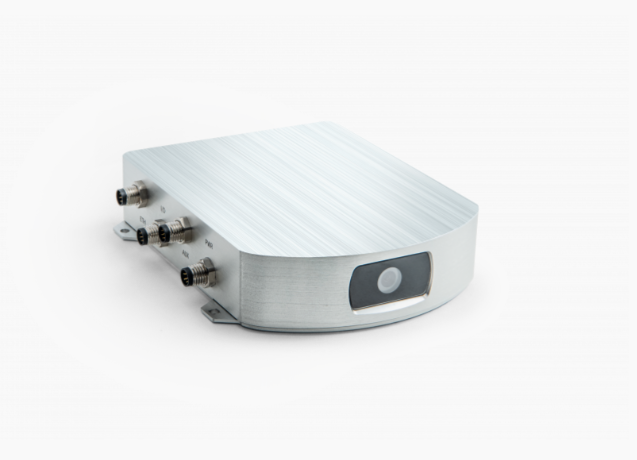
Movella Xsens Vision Navigator 视觉强化惯性导航系统是一个具有2个内置RTK GNSS接收器的全球导航卫星系统/惯性导航系统的视觉导航单元,Movella Xsens Vision Navigator 由视觉惯性里程计技术支持,用于精确跟踪3D位置、速度,可在大多数户外环境中实现冗余和精确定位。,且在GNSS信号弱的地区仍能保持出色的定位精度。
产品特点
规格参数
为解决GPS信号弱或完全消失的情况,一个跨学科团队研究出一种机械鸟形态的定位解决
近日,一支由西班牙和意大利科研人员组成的联合团队成功研发了一种创新车载监控系统,
近日,来自欧洲的一支奥地利科研团队联合高校和业界专家,通过在高尔夫球杆上安装IM
近年来流行的基于速度的训练方法(VBT),通过测量和分析运动过程中的速度变化,获
近日,来自中国的研究团队开发了一款基于IMU的可穿戴系统,用于评估膝关节骨关节炎