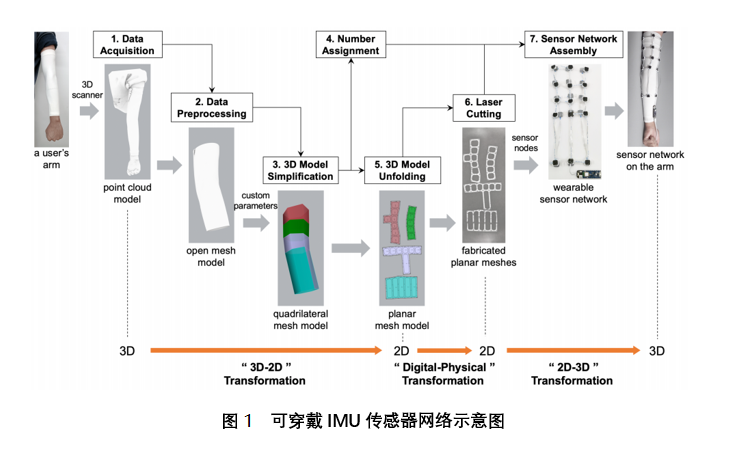
运动捕捉目前有两种主流方法,视觉捕捉能捕获复杂的三维几何变形,但依赖于昂贵的光学设备并且存在视线遮挡问题;基于IMU的方法虽然简便,但难以捕获细微的3D变形。为了解决这个问题,浙江大学的研究者们提出了一种可配置的自感知IMU传感器网络,解决IMU传感器网络中的数据稀疏性问题和传感器节点的部署问题。
在提出的方法中,使用了一种基于四杆结构的运动链模型来描述三维变形的最小变形过程;还引入了从初始形状、材料性质和运动特征中获得的三种几何先验,以帮助运动链模型重建变形并克服数据稀疏性问题。此外,为了进一步提高变形捕获的精度,提出了一种针对不同物体定制三维传感器网络的制造方法。实验结果表明,这种方法性能表现非常出色。