惯性测量单元(IMU)是航天器(如卫星和运载火箭)的基本部件,通常包含几个复杂的惯性传感器,如陀螺仪和加速度计。IMU不仅可以测量三轴角速度和加速度,在各种复杂环境条件下自主建立航天器的方位和姿态参考。此外,IMU为航天器提供姿态和位置信息,在机载控制器的反馈方面发挥关键作用。因此,IMU工作状态对航天器安全至关重要。
为监测IMU的工作状态并增强其稳定性,研究人员提出了几种故障诊断方法。目前,常见的故障诊断方法是将轨航天器的IMU数据传输到地面遥测中心进行分析。通过人工提取故障特征并对故障模式进行分类。这在很大程度上依赖于专家的丰富知识和经验,使得这项工作非常耗时,且花费大量的劳力成本。随着遥测数据量的快速增长,基于传统的机器学习方法(如决策树、支持向量机(SVM)和贝叶斯分类器等)的故障分类法显示出其局限性及诊断准确性不足的特点。因此,如何提高海量数据的诊断精度和效率迫在眉睫。
北京航空航天大学、北京航天自动控制研究所及北京电子系统工程师学院Gang Xiang团队提出了一种新的结合了深度残差卷积神经网络(CNN)和数据预处理算法的智能故障诊断方法。该算法首先采用短时傅里叶变换(STFT)对原始时域数据进行数据变换以提取有用的信息和特征。然后探索和利用Z-分数标准化和数据增强策略,以促进后续深度模型的训练。此外,改进的基于CNN的深度诊断模型利用参数校正线性单元(PReLU)作为激活函数和残差块,自动学习故障特征并分类故障类型。

由于航天器在工程场景中的弱故障特征,基于深度学习的故障变得越来越困难。团队提出一种新的IMU智能故障诊断方法,该方法基于一种带有短时间傅里叶变换(STFT)的深度残差卷积神经网络。首先,为了提取更多的特征,团队利用STFT来处理来自IMU的原始信号,并获得时间-频率特征。然后,我们采用了几种数据增强策略,使训练数据集更加多样化,以消除训练困难并避免由于小样本问题导致的过度拟合。最后,构造了一种新的深度模型,该模型采用残差卷积神经网络,以自动提取故障模型的判别特征表示,并高精度地识别故障类别。

故障诊断方法的框架图
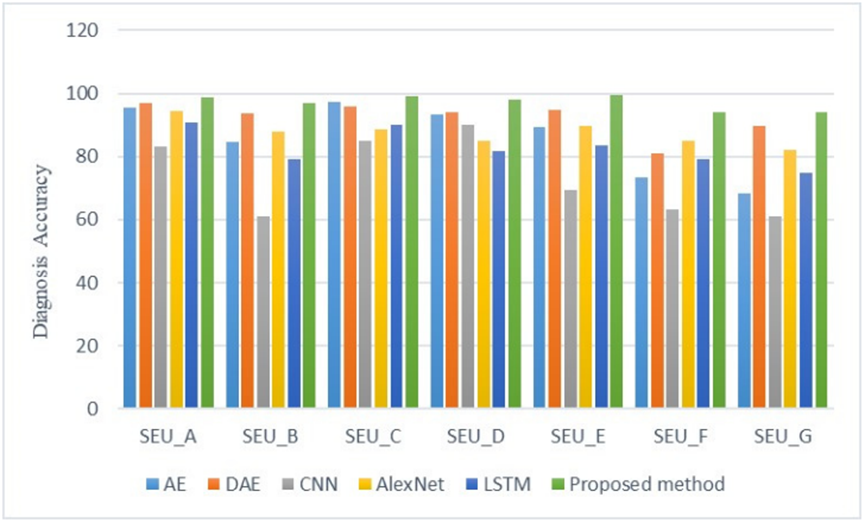
该团队在东南大学提供的SEU数据集上进行了实验,结果显示团队提出的方法在故障诊断准确率上优于其他算法,达到97.16%。
论文原文:https://www.mdpi.com/2075-1702/10/10/851