惯性传感器(IMU)被广泛用于导航、运动状态研究、人体运动和步态分析等领域。然而,由于IMU的固有误差和测量误差,尤其是漂移误差,很少有人尝试基于IMU实现精确的轨迹重建,尤其是使用单个IMU。尽管如此,与视觉、红外线和超声波定位技术相比,IMU的信号采集不受光照和遮挡等外部环境的影响,所以,基于IMU的运动轨迹重构具有巨大的应用潜力,可以为导航、机器人路径规划、运动控制等领域提供技术基础。
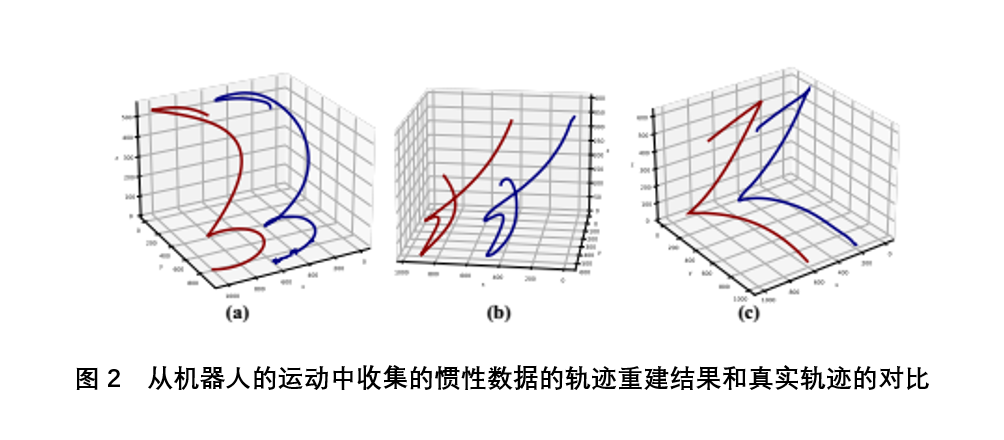
为了应对这一挑战,研究者们提出了一种新的轨迹重建方法,即几何动态分段重建(GDSR),这种方法将运动轨迹视为基本轨迹的组合。为此,一种时空交互分割方法应运而生。通过将IMU信号的动态特征与运动的空间形态特征相结合,将轨迹分解为基本片段。同时,建立了一个几何模型库匹配这些基本的分段轨迹,从而精确地重建原始轨迹分段。