Inertial sensors (IMUs) are widely used in navigation, motion state studies, human motion, and gait analysis. However, due to the inherent errors and measurement errors of IMUs, especially drift errors, few attempts have been made to achieve accurate trajectory reconstruction based on IMUs, especially using a single IMU. nevertheless, compared with vision, infrared and ultrasonic positioning techniques, the signal acquisition of IMUs is not affected by external environments such as lighting and occlusion, so IMU-based motion trajectory reconstruction has great potential for applications , which can provide a technical basis for navigation, robot path planning, motion control, and other fields.
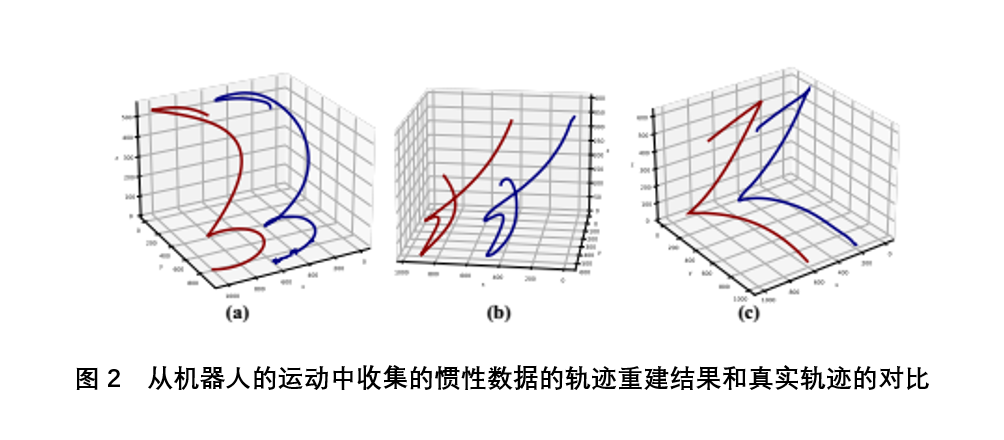
To address this challenge, researchers have proposed a new trajectory reconstruction method, namely geometric dynamic segmentation reconstruction (GDSR), which treats motion trajectories as a combination of fundamental trajectories. To this end, a spatio-temporal interactive segmentation method was developed. By combining the dynamic features of IMU signals with the spatial morphological features of motion, the trajectories are decomposed into elementary segments. At the same time, a geometric model library is built to match these basic segmented trajectories, thus accurately reconstructing the original trajectory segments.