使用飞速发展的硅半导体工艺制成的微机械电子系统(Micro Electro Mechanical System,MEMS)具有体积小、成本低、重量轻、低功耗等诸多优势。MEMS-IMU(Inertial Measurement Unit, IMU)构成的捷联惯导系统可以应用到无人机、卫星、飞行器等领域的姿态解算、导航与定位。遗憾的是,由于制作工艺复杂,解算精度会存在一定程度的下降。
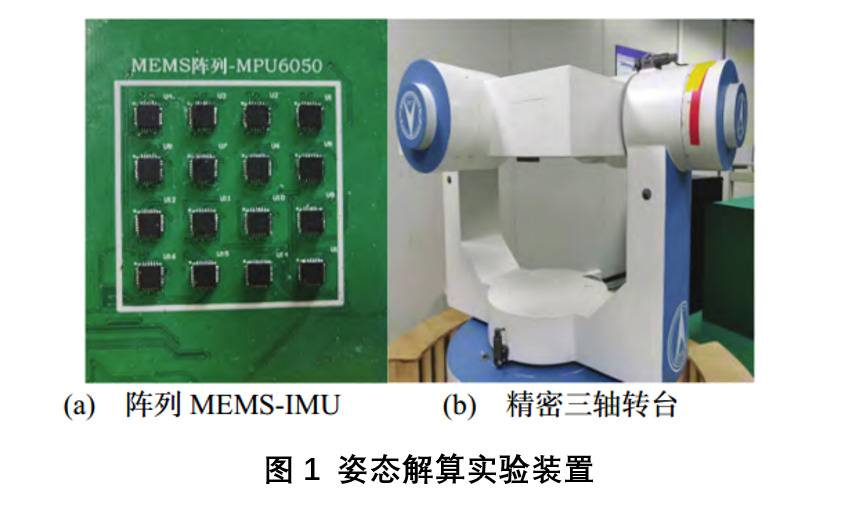
为解决 MEMS-IMU 姿态解算误差较大的问题,西安的研究者们提出了一种基于阵列 MEMS-IMU 数据融合的姿态解算系统,采用阵列 MEMS 芯片四元数矢量平均法进行轴对准,对阵列 MEMS-IMU 进行数据融合,再使用改进的动态卡尔曼滤波方法对运动中的载体姿态进行解算。通过与三轴精密转台对比,该解算系统可以在较复杂的动态运动中,更高效地将MEMS-IMU 的姿态解算能力提升到一个较优的精度水平。