Micro Electro Mechanical System (MEMS) made of rapidly developing silicon semiconductor process has many advantages, such as small size, low cost, light weight, low power consumption, etc. MEMS-IMU (Inertial Measurement Unit, IMU) constitutes the JieLian inertial guidance system which can be be applied to attitude solving, navigation and localization in the fields of UAVs, satellites and aircrafts. Unfortunately, due to the complexity of the production process, there is a certain degree of decline in the accuracy of the solution.
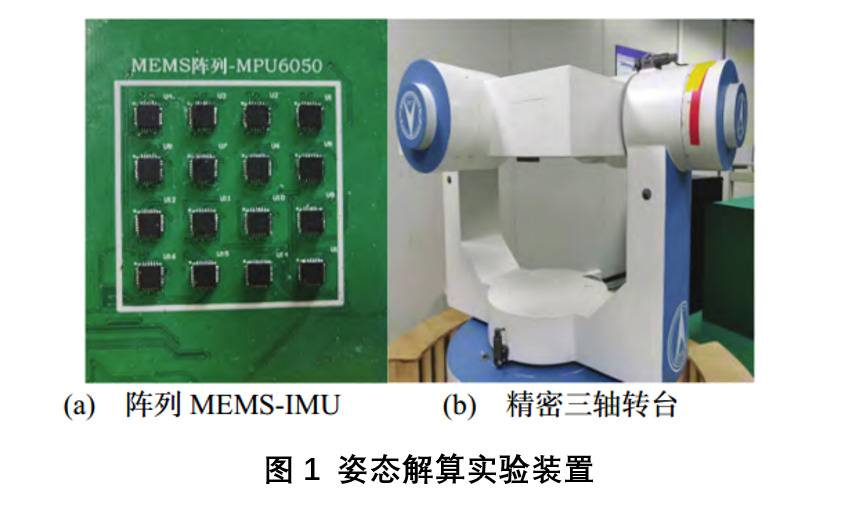
In order to solve the problem of large error in MEMS-IMU attitude solving, researchers in Xi'an proposed an attitude solving system based on array MEMS-IMU data fusion, which adopts the quaternion vector averaging method of the array MEMS chip for axis alignment, performs data fusion for array MEMS-IMU, and then solves the attitude of the carrier in motion by using improved dynamic Kalman filtering method. By comparing with a three-axis precision rotary table, this solving system can more efficiently improve the attitude solving capability of MEMS-IMU to a superior accuracy level in more complex dynamic motions.