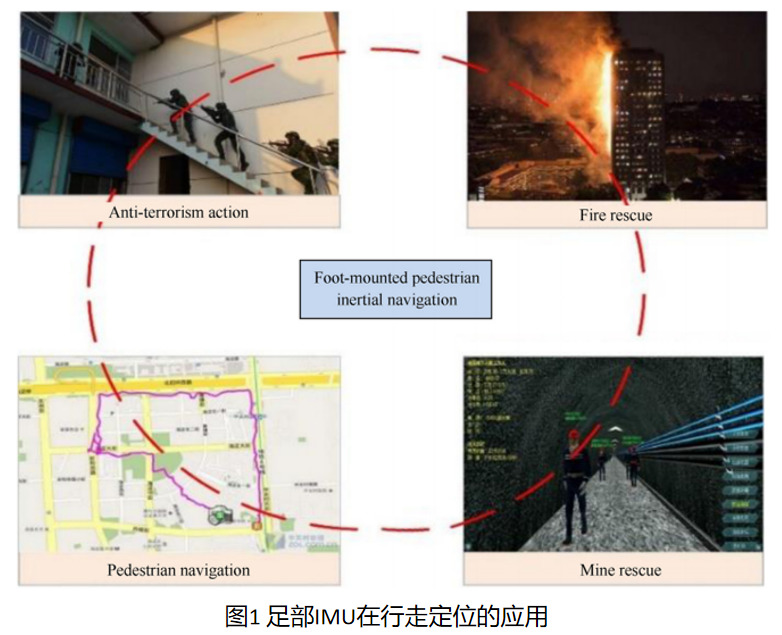
With the rapid development of microelectromechanical systems (MEMS) technology, MEMS-based inertial navigation systems (INS) play a vital role in the positioning of base stations in arbitrary environments. Inertial navigation is characterized by strong autonomy, high positioning frequency, low power consumption and real-time performance. Therefore, it is more suitable for situations where the environment is unknown and the infrastructure cannot be deployed in advance, such as man-portable combat, anti-terrorism operations, emergency rescue, fire rescue, and so on. However, running, turning, going up and down stairs, and even jumping and crawling in these application scenarios bring more challenges to the navigation and localization algorithms.
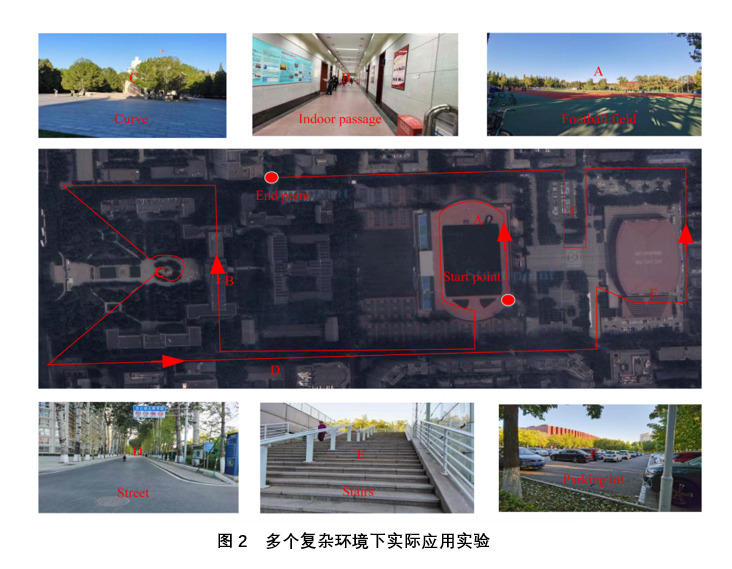
The main problems of inertial navigation are inaccurate detection of zero-velocity time intervals due to the complex and variable motion patterns of pedestrians, and difficulty in suppressing heading and elevation errors. To solve these problems, researchers proposed a bipedal localization method that combines inter-foot ranging. The method can effectively suppress heading and elevation errors and achieve long-term accurate and stable pedestrian localization without relying on any additional infrastructure and historical training data. Therefore, the proposed method is not only easy to be deployed in arbitrary unfamiliar and unprepared environments, but also easy to be integrated with other localization algorithms or IoT systems.