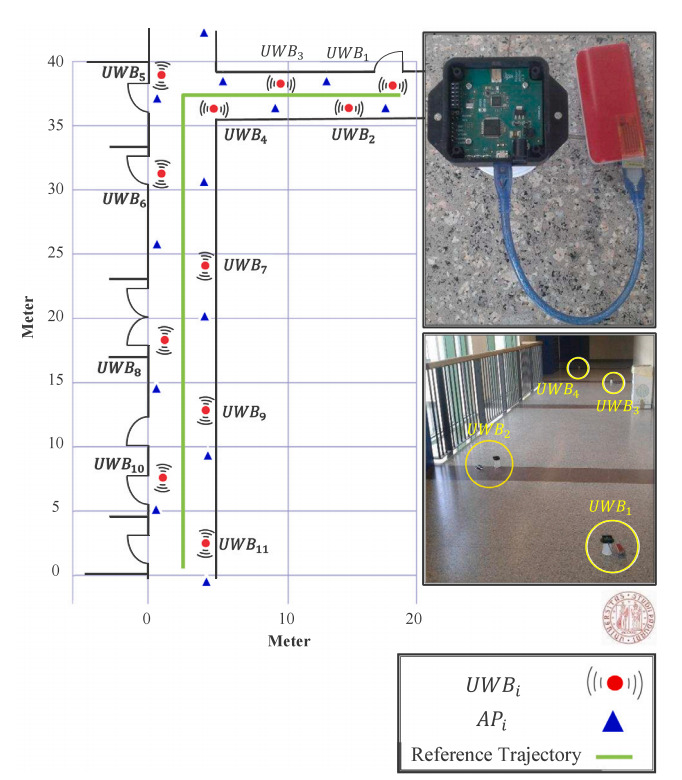
In indoor environments, Global Positioning System (GPS) signals are limited, making the development of high-precision indoor positioning techniques a hot research topic. Recently, a team of researchers from India used particle filtering algorithms and multi-sensor fusion techniques to explore the fusion of IMU and UWB measurements, demonstrating their combined potential for indoor positioning.
Where IMU excels in capturing precise short-term motion dynamics and UWB measurements provide absolute localization, the fusion of these data compensates for the inherent limitations of each sensor type, resulting in more accurate position tracking. In addition, experiments evaluate the performance and efficiency of the integrated approach, comparing it with a predefined reference path, highlighting the unique role of IMUs in enhancing indoor localization systems with a significant leap in accuracy.
It is experimentally verified that the fusion of IMU and UWB data significantly improves the accuracy of indoor localization. This shows that IMU can not only measure acceleration and orientation in experiments, but also effectively combine with other sensing data, providing a reliable method for accurate indoor localization.