| Thesis Title_EN | Paper Title_CN | Download Links |
| Two-Step Self-Calibration of LiDAR-GPS/IMU Based on Hand-Eye Method | Two-step self-calibration of LiDAR-GPS/IMU based on hand-eye method | Download |
| Error State Extended Kalman Filter Localization for Underground Mining Environments | Error State Extended Kalman Filter Localization for Underground Mining Environments | Download |
| Mapping and localization for autonomous ship using LiDAR SLAM on the sea | Autonomous ship mapping and positioning using LiDAR SLAM at sea | Download |
| Position and Attitude Determination in Urban Canyon with Tightly Coupled Sensor Fusion and a Prediction-Based GNSS Cycle Slip Detection Using Low-Cost Instruments | Determining position and attitude in urban canyons using low-cost instrumentation via tightly coupled sensor fusion and prediction-based GNSS cyclic slip detection | Download |
| Research on Multi-Sensor Fusion SLAM Algorithm Based on Improved Gmapping | Research on multi-sensor fusion SLAM algorithm based on improved Gmap | Download |
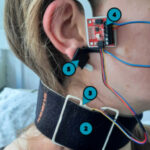
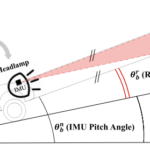
| Feasibility of an inertial measurement unit sensor-based guiding system for benign paroxysmal positional vertigo treatment: A pilot study | Feasibility of an inertial measurement unit sensor-based guidance system for the treatment of benign paroxysmal positional vertigo: a preliminary study | Download |
| A factor set-based GNSS fault detection and exclusion for vehicle navigation in urban environments | A factor set-based GNSS fault detection and troubleshooting for vehicle navigation in urban environments | Download |