With an aging population, improving the exercise health of the elderly has become one of the major challenges of our time. A recent study explored the possibility of adapting industrial robots to assist in motor therapy. The experiment focused on the use of an Inertial Measurement Unit (IMU) to analyze lower limb movements in order to assess the effectiveness of therapy implementation.

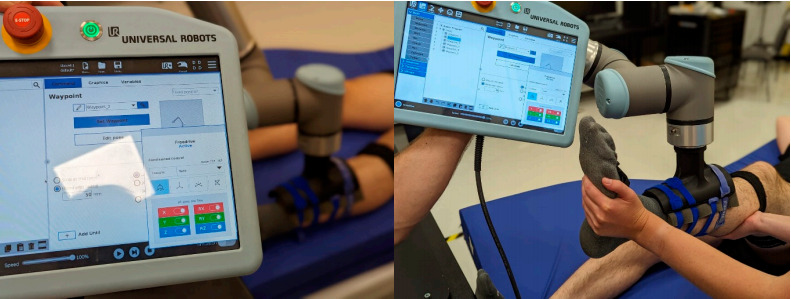
The experiment consisted of four rounds of a total of ten repetitions of proprioceptive neuromuscular facilitation (PNF) movements, with the first two rounds performed with the assistance of a physiotherapist and the last two rounds assisted by the robot. The data collected through the IMU were analyzed in detail for hip flexion and abduction angles, knee flexion and rotation angles, ankle dorsiflexion angles, and movement cycles. The results of the study show that the robot plays a unique role in repeating precise physiotherapy movements and has excellent performance in reproducing hip and knee movements.
The results of the study demonstrate the remarkable potential of robots in reproducing physical therapy movements in sports therapy, heralding the prospect of innovative applications of industrial robots in medical rehabilitation. The IMU, as a key technology for recording and analyzing movements, plays an indispensable role in accurately capturing and evaluating treatment effects. This experiment will not only have practical implications for improving existing rehabilitation programs, but will also serve as an inspiring guide for IMU engineers to further optimize this technology for medical devices.